Maliyet Optimize Otonom Uçuş:
NexusV2 Uçuş Kontrolcüsü
Üretime Hazır İHA Platformları için Yapay Zeka Destekli Navigasyon.
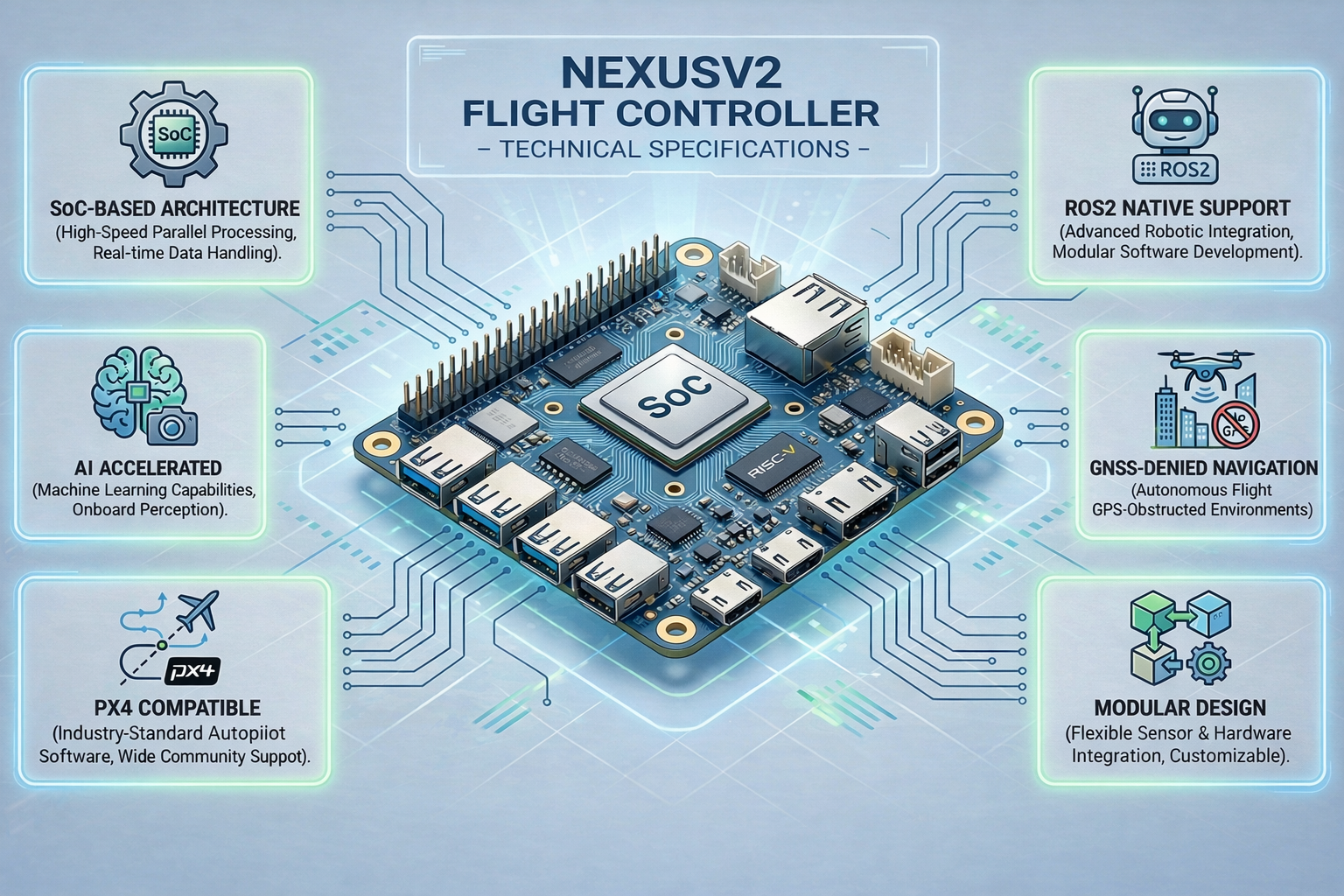
SOC TABANLI MİMARİ
Yüksek Hızlı Paralel İşleme, Gerçek Zamanlı Veri İşleme.
YAPAY ZEKA HIZLANDIRMALI
Yerleşik Makine Öğrenmesi ve Algılama.
GNSS-BAĞIMSIZ NAVİGASYON
GPS Engelli Ortamlarda Otonom Uçuş.
ROS2 YEREL DESTEK
Gelişmiş Robotik Entegrasyon, Modüler Yazılım Geliştirme.
PX4 UYUMLU
Endüstri Standardı Otopilot Yazılımı, Geniş Topluluk Desteği.
MODÜLER TASARIM
Esnek Sensör ve Donanım Entegrasyonu, Özelleştirilebilir.